
 Become a TechRadar Insider
Become a TechRadar Insider







It's a tough life being a Mars rover. You get shot into space, parachuted down onto an inhospitable planet, then forced to work 24/7 for years, without breaks, as your parts slowly degrade until you can't communicate any more, at which point you're abandoned to the red dust.
But there's no shortage of volunteers for the job. The latest is the Pop-Up Flat Folding Explorer Robot, or PUFFER for short, which Nasa engineers are building at the Jet Propulsion Laboratory in Pasadena, California.
Inspired by origami, PUFFER is capable of folding itself almost totally flat, tucking in its wheels, and crawling into spaces where normal rovers can't fit. It can also clamber up 45-degree slopes, check out overhangs and even fall into pits or craters.
Companion
The teensy bot has been designed as a companion to a more traditional rover. Several of the microbots could be included on a mission, flattened like cards and stacked on top of each other. When needed, they can then be flipped out and begin scouting.
"They can do parallel science with a rover, so you can increase the amount you're doing in a day," said Jaakko Karras, PUFFER's project manager at JPL. "We can see these being used in hard-to-reach locations – squeezing under ledges, for example."
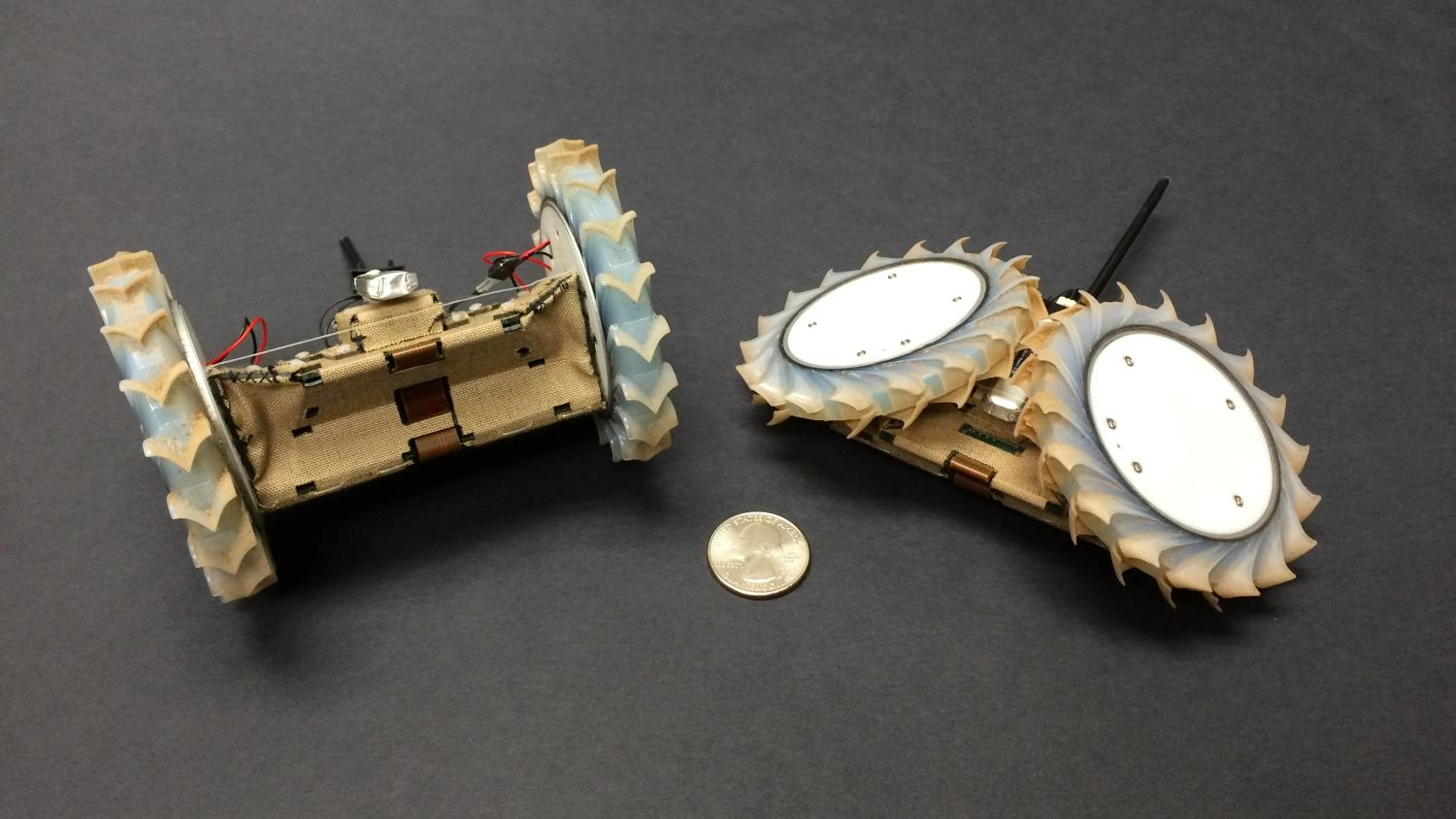
PUFFER is equipped with two treaded wheels, a tail for stability and solar panels on its belly that allow it to flip over to recharge. A high-resolution micro-imager allows it to see objects just 10 micrometres in size.
Rugged environments
So far the bot has been tested in a variety of rugged environments – a ski resort in Grand Junction, Colorado, in Big Bear, California, and on Mount Erebus, an active volcano in Antarctica. On a flat path it can manage about 625 metres on one battery charge.
The next step is to figure out what instruments to add for maximum usefulness to future space research. A spectrometer could allow it to study the chemical makeup of its environment, while other sensors could let it sample water for organic material.
"Small robotic explorers like PUFFER could change the way we do science on Mars," Karras said. "Like Sojourner before it, we think it's an exciting advance in robotic design."
