









Researchers at MIT Computer Science and Artificial Intelligence Laboratory (CSAIL) and Harvard have found a novel solution to the problem of building a robot that's strong enough to lift an object several times its own weight, but gentle enough not to crush something fragile.
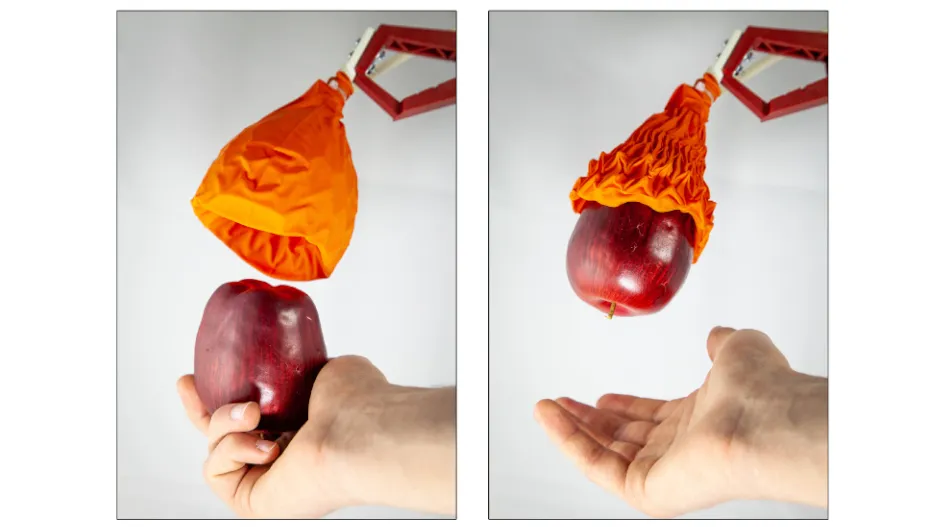
The result is a robot 'hand' with a folding structure that collapses around an object to hold it securely (like a Venus flytrap trapping an insect).
This flexible design and gentle grip let it grasp a wide range of objects without damaging them, and it's strong enough to keep a firm hold on objects 100 times its own weight.
- The best robot toys of 2019
- This month's best robot vacuum cleaner deals
- How Anki builds robots with personality
Many multi-purpose grippers use fingers made from a flexible material like rubber. These can cope with objects of different sizes and shapes, but are unable to hold onto bulky or heavy objects.
Other 'hands' use ball-shaped grippers, which deform to hold onto objects, but only work well from certain angles.
The new gripper is totally different, with an interior skeleton inspired by by an origami magic ball, a soft rubber or fabric skin, and a connector. A vacuum causes the structure to collapse around the object, holding it securely without crushing it.
Get a grip
“One of my moonshots is to create a robot that can automatically pack groceries for you,” said MIT professor Daniela Rus, director of MIT CSAIL, and one of the senior authors of a new paper about the project.
“Previous approaches to the packing problem could only handle very limited classes of objects – objects that are very light or objects that conform to shapes such as boxes and cylinders, but with the Magic Ball gripper system we’ve shown that we can do pick-and-place tasks for a large variety of items ranging from wine bottles to broccoli, grapes and eggs. In other words, objects that are heavy and objects that are light. Objects that are delicate, or sturdy, or that have regular or free form shapes.”
The research team hope that the design could be used for production lines in factories, where it would eliminate the need to invest in highly specialized machines for particular tasks, which become obsolete when designs and production techniques change.
