









Researchers at MIT have developed a system of companionable automated boats that can seek each other out, grab on, and keep trying if they miss.
The rectangular rafts are part of the Roboat project, and could be used to form temporary footbridges, stages for live performances, and platforms for markets when street space is at a premium.
- Self-driving cars: everything you need to know
- Your complete guide to electric vehicles
- Life without cables: wireless electric charging explained
They could also be used to skim trash from the surface of waterways at night, and large versions could carry passengers on sightseeing canal cruises like mechanical gondoliers.
River dance
The Roboat project is a joint venture between MIT and the Amsterdam Institute for Advanced Metropolitan Solutions (AMS Institute), and is intended to help make better use of Amsterdam's waterways.
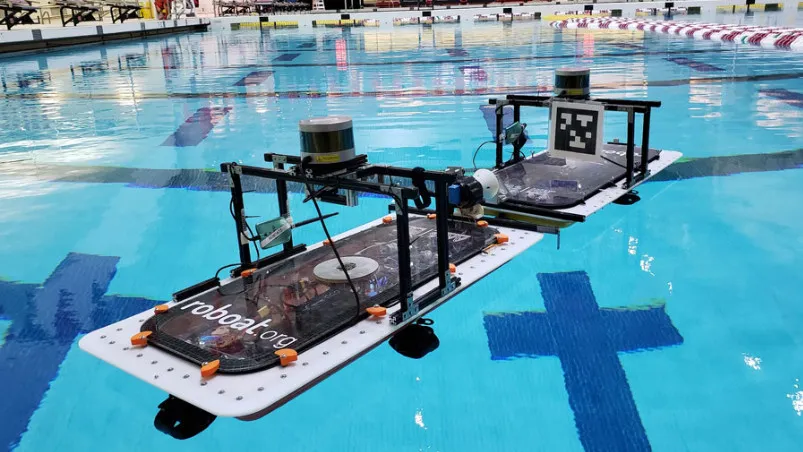
Each boat is kitted out with sensors, thrusters, microcontrollers, cameras and GPS modules, enabling them to navigate and respond to their surroundings.
The latest addition (tested in a swimming pool at MIT and the Charles River) allows them to identify and connect to docking stations using a customized latching mechanism. They will try again if they miss, but in the tests they were able to connect successfully in about 10 seconds.
