








-

7 smart home tips to help you save energy and reduce waste
Smart home devices don’t just make life easier, they can also help you save energy and minimize waste.
-
-

This Swedish startup made the tech behind the world’s first solar-powered headphones – here’s how it works
Meet the company making gadgets like headphones, speakers and remotes better for the planet with solar power.
-
 Sustainability Week 2024
Sustainability Week 2024Acer shows Apple how environmentalism is done with pledge to collect equivalent of 2.5 million plastic bottles with Plastic Bank partnership
Acer is one of the best companies for living up to its green pledges – and it’s now taking on plastic waste.
-

This company is making 35-year-old Game Boys look and work like new and now I'm hooked on Tetris
Retrospekt refurbs hundreds of Game Boys, Polaroid cameras, Sony Walkmans, and other gadgets to keep them in our hands and out of landfills.
-

Brighter, low-energy OLEDs are going into production this year – but they won’t be coming to TVs just yet
New OLED displays could be twice as bright, twice as efficient and last three times longer but the best TVs won't be the first to see this new tech.
-





-
 Updated
UpdatedDeezer review
Deezer has a huge library, minimal design and good recommendations – but there’s little to set it apart from its rivals.
-
-

Lomography Lomomatic 110 review: Brand-new 50-year-old technology
The Lomography Lomoatic 110 is a 110-film camera that's simple to load and use.
-

Asus ROG Strix Scope II RX review: a keyboard for the sophisticated gamer
A top-notch keyboard with great performance and a rich feature set, the only thing that lets the Asus ROG Strix Scope II RX down is its lackluster software suite.
-

Nikon Z 40mm f/2 review: this cheap, modern 'nifty forty' has been my everyday lens for over a year and it hasn't let me down
Nikon's cheapest prime is a cost-effective entry-point into the Z mount ecosystem and a great take on the 'Nifty Fifties' of old.
-

Instant Vortex 9-quart Air Fryer with VersaZone technology review: competent, but not flawless
The Instant Vortex Air Fryer with VersaZone technology serves up a large single cooking basket that can be divided into two for fuss-free air frying.
-

Withings ScanWatch Nova review: analog looks with exceptional digital brains
The Withings ScanWatch Nova 2 is an unassuming yet powerful smartwatch and health tracker.
-

JLab JBuds Lux ANC review: budget headphones that are all about that bass
The JLab JBuds Lux ANC are the brand's first 'luxury' over-ear headphones, which offer lots of bass but a few aches too.
-







How TechRadar tests

Product testing for the real world
You need to know that the device or service you’re about to spend money on works as advertised - and that it works in the real world.
- We test properly: objective and subjective testing
- We use experienced experts for our reviews
- We always offer 100 per cent unbiased, independent opinions
reviews
hours' testing
buying guides
-
 Sustainability Week 2024
Sustainability Week 2024This swirly power bank might be the most sustainable battery pack on the planet
Gomi makes power banks from recycled e-bike batteries and plastic bags, with excellent repairs, for peak sustainability.
-
-
 Updated
UpdatedThe best power banks 2024
Here are the best power banks, whether you're after a slim portable charger for phones or a large bank to juice up your tablet.
-

This Game Boy-styled MagSafe stand just tickled my retro-gaming synapse – now all I need is a matching controller for Nintendo emulators
This retro Nintendo MagSafe stand has me rushing for Amazon – just take my money.
-

Does closing apps on your iPhone save battery life? The surprising answer is no – here's why
Closing background apps has a negligible impact on your iPhone's battery life and performance – and Apple's confirmed it.
-

Nothing could be working on an enhanced Phone 2a and a new flagship Phone 3
Nothing could be working on two more phones, including a Phone 2a Pro model and a Phone 3.
-

Gemini AI is heading to older Android phones, and could get a new 'conversation' mode
Fresh leaks around the Gemini AI app for Android point to a new mode and support for older devices.
-

Don't miss the Samsung Galaxy S23 Ultra for just $849 at Best Buy right now
Best Buy has cut more than $500 off the Samsung Galaxy S23 Ultra, bringing the price down to just $849.
-







-

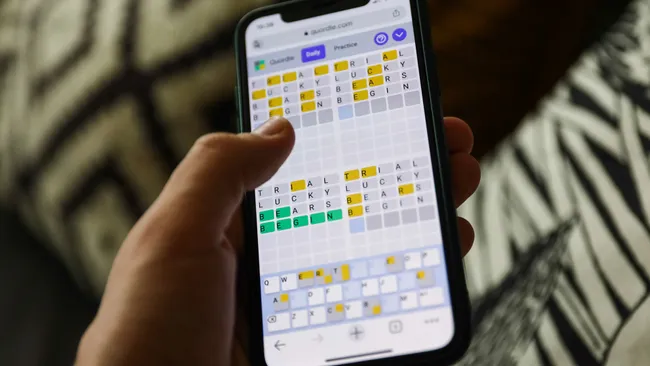
Quordle today – hints and answers for Thursday, April 25 (game #822)
Looking for Quordle clues? We can help. Plus get the answers to Quordle today and past solutions.
-
-

NYT Strands today — hints, answers and spangram for Thursday, April 25 (game #53)
Looking for NYT Strands answers and hints? Here's all you need to know to solve today's game, including the Spangram.
-

NYT Wordle today — answer and hints for game #1,041, Thursday, April 25
Looking for Wordle hints? We can help. Plus get the answers to Wordle today and yesterday.
-

Adobe's next big project is an AI that can upscale low-res video to 8x its original quality
Blurry clips improved by Adobe's VideoGigaGAN AI can display hi-res textures and more making videos look realistic.
-
 Updated
UpdatedThe best gaming PC 2024
Finding the best gaming PC for you can be tricky, with confusing spec sheets and numerous configurations - but we're here to help.
-

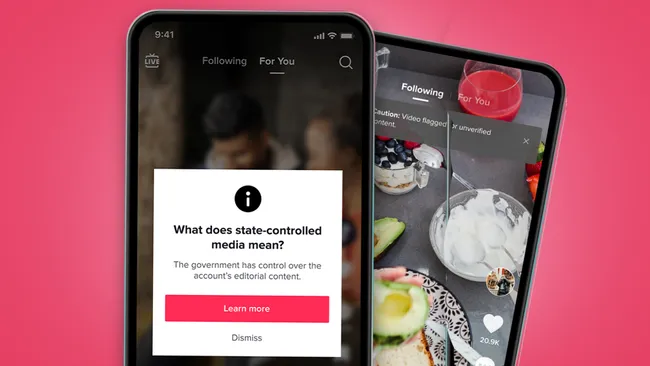
The TikTok ban just got closer – here's what the new US law means and what happens next
TikTok now faces the very real prospect of being banned in the US, unless its owner sells the app. Here's what happens next.
-

AI Explorer could revolutionize Windows 11, but can your PC run it? Here's how to check
AI Explorer is an exciting feature coming to Windows 11, but your PC might not be able to run it. Here's how to check.
-






-
 Updated
UpdatedThe best cheap tablets 2024
Looking for the best cheap tablet that's actually worth buying? Whether you're after an Amazon, Android, or iPad tab, you'll find our favorite budget options here.
-
-
 Updated
UpdatedThe best iPad 2024
Whether you want the best iPad Pro or the best cheaper iPad, a small iPad mini or a thin-yet-powerful iPad Air, you'll find the top options here.
-

Apple sale at Best Buy - I've picked the 8 best deals on iPads, AirPods and MacBooks
Over a dozen Apple deals are now live at Best Buy so I've searched through the sale and picked out 8 of the best ones on iPads, AirPods, MacBooks and iPhones.
-

Report claims Vision Pro sales have ‘fallen sharply’ as Apple struggles to whip up demand
An Apple analyst believes Apple has slashed shipments of the Vision Pro as it has struggled to generate sales.
-

The 11-inch iPad Pro 2024 might be hard to get hold of at launch
Samsung is reportedly having issues making screens for the 11-inch iPad Pro 2024, which could lead to limited supplies.
-





-

Netflix's Wednesday season 2 cast clicks into gear with Westworld star addition as Apple's Neuromancer series finds its lead
Some top-tier talent just joined some of our most-anticipated streaming shows from Apple TV Plus and Netflix.
-
-

Netflix's official Atlas trailer puts Jennifer Lopez in another generic Terminator clone, but with Titanfall-like mechs
It feels like we've seen and heard a lot of this before. Is Netflix's new Atlas movie more than its obvious sci-fi influences?
-

Prime Video movie of the day: Interstellar is Christopher Nolan's best movie
Nolan's space thriller is epic and personal in equal measure.
-

Netflix movie of the day: May December is a crafty satire of tabloid true stories and, smartly, itself
Built on three amazing acting performances, this film walks the line between comedy and genuine family drama.
-

Netflix subscribers can’t get enough of 2019 spy thriller Anna – watch these 3 skilful assassin movies next
There's plenty of kills, thrills and bellyaches in these three very different spy movies about killers.
-





-
-

Best Buy is slashing prices on our best-rated OLED TVs - save over $1,000 while you can
Best Buy is having a huge sale on our best-rated OLED TVs, and I'm rounding up the best deals with over $1,000 from Samsung and LG.
-
 Updated
UpdatedThe best indoor TV antennas for 2024
These are the best indoor TV antennas for watching free TV channels at home.
-

How to buy a good secondhand TV, or make your old TV last longer
Buying a secondhand TV is a great way to save money and help prevent waste, but navigating it can be a bit of a minefield - we're here to help with that.
-
Brighter, low-energy OLEDs are going into production this year – but they won’t be coming to TVs just yet
New OLED displays could be twice as bright, twice as efficient and last three times longer but the best TVs won't be the first to see this new tech.
-

JMGO’s new 4K projector has a built-in gimbal so you can place it anywhere in your home
The new JMGO N1 Ultra promises to be the perfect projector for pretty much any space.
-

New Google TV 4K streaming stick tipped to land soon – and it could come with a new remote
Nearly four years after the Chromecast with Google TV 4K launched, there are rumors that a new one could launch soon.
-
 Hot deals
Hot dealsThe cheapest OLED TV deals and sales for April 2024
Your guide to the best OLED TV deals with incredible sales from brands like Sony, LG, and more.
-






-
-

The next HomePod could be more like a soundbar according to this Apple patent – and it hints at fixing the HomePod 2’s biggest issue
The next Apple HomePod might be getting an unexpected design and an exciting new addition.
-
 Updated
UpdatedDeezer review
Deezer has a huge library, minimal design and good recommendations – but there’s little to set it apart from its rivals.
-

'In the beginning I didn't want to – my son persuaded me': why Audiovector's Trapeze Reimagined speaker is a 45-year family affair
Audiovector is a Danish outift that's serious about sound, but it's also the father-and-son heartwarming hi-fi tale you need.
-

Soundcore's new sports earbuds offer a Powerbeats Pro-style customizable secure fit for a fraction of the price
The Sport X20 specializes in customization as you can adjust the hook to fit your ear and tweak its audio output.
-
 TechRadar Deals
TechRadar DealsBest Apple Memorial Day sales 2024: date and deals to expect
Your guide to this year's Memorial Day Apple sales event, with key information such as the date and deals to expect.
-

The best wireless earbuds 2024
Here are our picks of the best wireless earbuds for Android, for iPhone, or anything else you want to connect them to.
-

This Android phone for audiophiles offers a hi-res DAC, balanced output and 3.5mm jack – plus a cool cyberpunk look that puts Google and OnePlus to shame
Stylish audio brand Moondrop’s first phone is more of a hi-res digital audio player with OnePlus and Google Pixel features.
-







-
-
 Updated
UpdatedThe best bone conduction headphones 2024
Looking for the best bone conduction headphones to keep you aware of the outside world? Here are our top picks.
-

Wear OS 5: what we want to see, and all the leaks so far
Wear OS 5 could land this year. Here's what we've heard about it and what we want from it.
-

OnePlus Watch 2 Nordic Blue is the Wear OS dive watch I’ve been waiting for
OnePlus Watch 2 gets a dive watch makeover reminiscent of the Samsung Galaxy Watch 6 Classic.
-



-
-
 Updated
UpdatedThe best camera for photography 2024
Our guide to the best camera for photography will help you find the right digital camera for you, whatever your budget.
-
 Updated
UpdatedThe best cameras for vlogging 2024
Our guide to the best cameras for vlogging rounds up all of our top picks for on-the-move video creators, at all price points.
-
Lomography Lomomatic 110 review: Brand-new 50-year-old technology
The Lomography Lomoatic 110 is a 110-film camera that's simple to load and use.
-
 Updated
UpdatedThe best compact cameras for 2023
Our best compact camera for 2024 guide will help you find the right pocket camera for you, whatever your budget.
-



-
-
 Updated
UpdatedThe best vacuum cleaner 2024
These are the fastest, quietest, smartest, most powerful vacuum cleaners for every kind of home.
-

New Google Nest Audio and Nest Hub Max devices could be in the works
Google could be working on new Nest Audio and Nest Hub Max devices, and there's potential for generative AI to be front and center.
-

This company just bioengineered a plant-bacteria combo to clean air better than an air purifier
Neoplants Neo PX is both a plant and an air-cleaning system
-
Instant Vortex 9-quart Air Fryer with VersaZone technology review: competent, but not flawless
The Instant Vortex Air Fryer with VersaZone technology serves up a large single cooking basket that can be divided into two for fuss-free air frying.
-



-
 Updated
UpdatedThe best gaming PC 2024
Finding the best gaming PC for you can be tricky, with confusing spec sheets and numerous configurations - but we're here to help.
-
-
 Updated
UpdatedThe best cheap tablets 2024
Looking for the best cheap tablet that's actually worth buying? Whether you're after an Amazon, Android, or iPad tab, you'll find our favorite budget options here.
-
Updated
The best power banks 2024
Here are the best power banks, whether you're after a slim portable charger for phones or a large bank to juice up your tablet.
-
Updated
The best iPad 2024
Whether you want the best iPad Pro or the best cheaper iPad, a small iPad mini or a thin-yet-powerful iPad Air, you'll find the top options here.
-
Updated
The best vacuum cleaner 2024
These are the fastest, quietest, smartest, most powerful vacuum cleaners for every kind of home.
-
Updated
The best camera for photography 2024
Our guide to the best camera for photography will help you find the right digital camera for you, whatever your budget.
-
Updated
The best bone conduction headphones 2024
Looking for the best bone conduction headphones to keep you aware of the outside world? Here are our top picks.
-


Why we're experts

We care passionately about tech
The TechRadar team has a life-long passion for the latest innovations – over 300 years of experience between us, in fact – and we’ve made it our mission to share that combined knowledge and expertise with you.
We’re here to provide an independent voice that cuts through all the noise to inspire, inform and entertain you; ensuring you get maximum enjoyment from your tech at all times. Technology is our passion, so let us be your expert guide.
years' experience
how-tos written
Apple events covered
-
-
 Deals
DealsMother's Day sales 2024: deals from Walmart, Target, Amazon and more
Your 2024 Mother's Day sales guide with all the best deals from Walmart, Target, and Amazon on gifts, jewelry, flowers, and more.
-

Amazon has a ton of cheap tech gadgets on sale – I've found the 13 best ones
Amazon has a ton of its cheap tech gadgets on sale right now, and I'm rounding up the 13 best ones with prices starting at $19.99.
-

AMD's flagship graphics card, the RX 7900 XTX, is under $850 for the first time ever
The AMD Radeon RX 7900 XTX, AMD's flagship graphics card, has dipped below the $850 price threshold for the first time ever.
-
Apple sale at Best Buy - I've picked the 8 best deals on iPads, AirPods and MacBooks
Over a dozen Apple deals are now live at Best Buy so I've searched through the sale and picked out 8 of the best ones on iPads, AirPods, MacBooks and iPhones.
-
TechRadar Deals
Best Apple Memorial Day sales 2024: date and deals to expect
Your guide to this year's Memorial Day Apple sales event, with key information such as the date and deals to expect.
-
Don't miss the Samsung Galaxy S23 Ultra for just $849 at Best Buy right now
Best Buy has cut more than $500 off the Samsung Galaxy S23 Ultra, bringing the price down to just $849.
-



-
-

OnePlus Coupons for April 2024
Use these OnePlus coupons to get a better price on mobiles & accessories from the leading Android smartphone retailer.
-

Keeper Security Promo Codes for April 2024
Look through our Keeper Security promo codes to save on subscriptions to the online password manager and protect your details online for less.
-

Casper Coupons for April 2024
These Casper coupons can help you save big on your next bedding purchase from sheets, pillows, mattresses, and more.
-

Paramount Plus Coupon Codes for April 2024
Our Paramount Plus coupon codes can be added to your subscription to help you save on monthly streaming fees.
-




TechRadar's story

Our mission is unchanged
TechRadar was launched in January 2008 with the goal of helping regular people navigate the world of technology. It quickly grew to become the UK's biggest consumer technology site.
Expansions into the US and Australia followed in 2012 and we are now one of the biggest tech sites in the world.
- We've been covering tech since 2008
- 17 international editions from Mexico to New Zealand
- We're a globally respected brand worldwide
-
-
Adobe's next big project is an AI that can upscale low-res video to 8x its original quality
Blurry clips improved by Adobe's VideoGigaGAN AI can display hi-res textures and more making videos look realistic.
-
AI Explorer could revolutionize Windows 11, but can your PC run it? Here's how to check
AI Explorer is an exciting feature coming to Windows 11, but your PC might not be able to run it. Here's how to check.
-

Google Maps is getting a new update that’ll help you discover hidden gems in your area thanks to AI - and I can't wait to try it out
Google Maps has an upcoming AI feature that’ll make it much easier to discover new places in your town.
-

Bad news, Windows 11 users: ads are coming to the Start menu, but there’s something you can do about it
Microsoft's optional Windows 11 update introduces ads in the Start Menu, sparking discussion over intrusive marketing tactics and user experience.
-


-
-
 Buying Guide
Buying GuideBest HDMI cable for PS5 in 2024
This is our definitive guide to buying the best HDMI cable for PS5 no matter your requirements or budget.
-
 Buying Guide
Buying GuideThe best monitors for PS5 in 2024
Make the most of your console with these recommendations for the very best PS5 monitors no matter your budget.
-
 Updated
UpdatedThe Witcher 4 - everything we know so far about Polaris
The Witcher 4 release date has yet to be revealed, but it is being worked on. Here's what we know so far.
-

Xbox Series S vs Xbox One S: the cheapest Xbox consoles compared
Xbox Series S vs Xbox One S debate offers great entry points into the ecosystem, but one is starting to show its age.
-




Between them, the TechRadar team have 300 years' experience in tech journalism. Here's why you should trust them.



















-
-

Over a billion users could be at risk from keyboard logging app security flaw
Most Chinese mobile manufacturers used vulnerable keyboards which relayed keystrokes in plain text.
-

Apple is reportedly developing its own AI servers — could it be gearing up to take on Nvidia and AMD?
Apple reportedly wants to use AI to enhance its own data centers.
-

CDN network cache hacked to spread malware across the globe
Hackers are targeting companies around the world with infostealers hosted in CDN network caches.
-
 VPNs explained
VPNs explainedWhat is a VPN? VPN meaning explained in 2024
VPN stands for "Virtual Private Network", a security tool that protects your online privacy and encrypts your traffic. Here's everything you need to know.
-



